Hallo zusammen,
Heute möchte ich mal ein bisschen was zur Entstehung der "Rettu 1" (wer hat sich nur diesen Namen ausgedacht?

) schreiben. Dazu werde ich erst mal etwas weiter ausholen.
Angefangen hat das Ganze schon vor etwa 2 Jahren, damals hatte ich schon einige Versuche mit einer Stromgegenkopplung gemacht:
http://www.aktives-hoeren.de//viewtopic ... 7&start=45. Das Ergebnis konnte sich schon sehen lassen, allerdings variierten die LS-Parameter immer etwas und man musste den Analogrechner neu einstellen. Also nicht besonders langzeittauglich...

Zu der Zeit hatte auch Roman angefangen seine erste Sensorregelung zu bauen und ich machte mir auch meine Gedanken, wie man so einen Sensor aufbaut und in den Lautsprecher integriert. Wie es der Zufall so will fanden sich in meiner Werkstatt eine Fräs- und Drehmaschine ein, wodurch sich für mich ganz neue Möglichkeiten auf taten und ich somit erstmals die Voraussetzungen hatte so ein Sensorsystem in einer brauchbaren Qualität herzustellen.

Die nächste Hürde war dann einen Backlackdraht mit 40µm für die Sensorspule aufzutreiben. Der einzige Händler der Kleinmengen auch an Privatleute verkauft (
http://www.spulen.com), hatte kurz vorher Insolvenz angemeldet; bei allen anderen Händlern gab es den Draht erst ab 100µm aufwärts.
Ich habe auch bei einigen Herstellen direkt angefragt; die kleinste Spule hatte da 2kg, was glaub ich 100km Draht wären, zu Preisen von 200€ aufwärts...

Ich hatte die Suche bereits aufgegeben, da fand ich zufällig eine kleine Rolle in der Bucht aus einer Werkstattauflösung, welche ich dann für schlappe 10€ bekam.
Als nächstes machte ich mich daran eine Vorrichtung zum Wickeln der Spulen zu bauen. Da traf es sich gut, dass ich noch eine Kiste Fischertechnik auf dem Dachboden hatte. Damit war ein erster Prototyp schnell gebaut (welcher bis heute gute Dienste leistet):
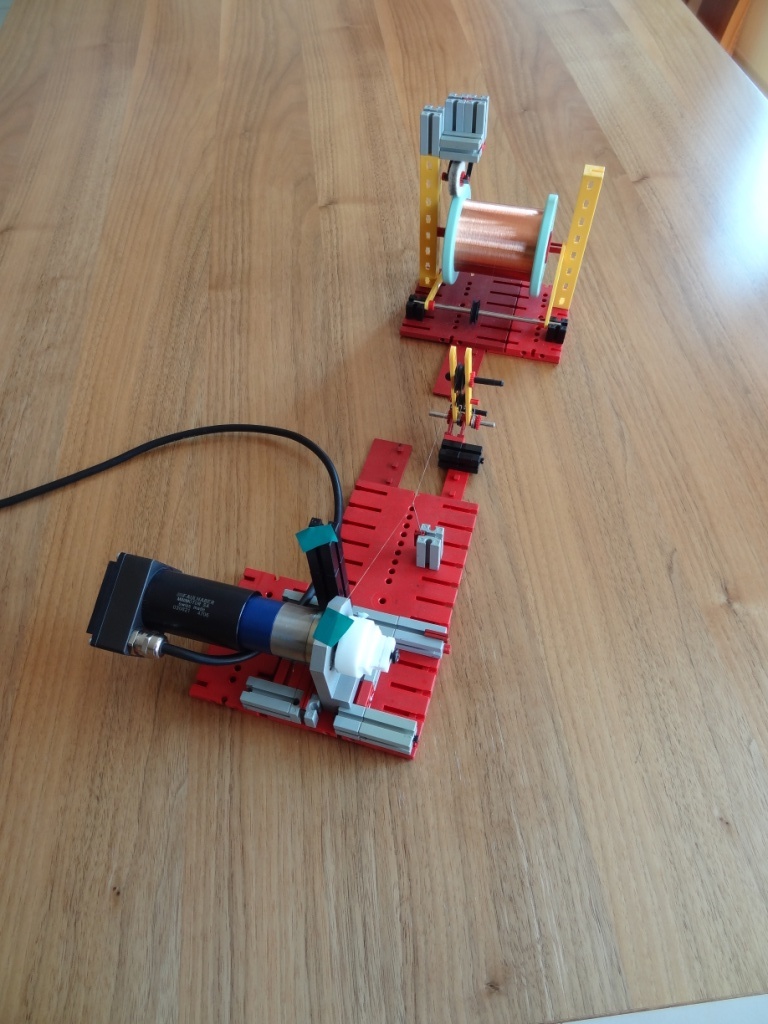
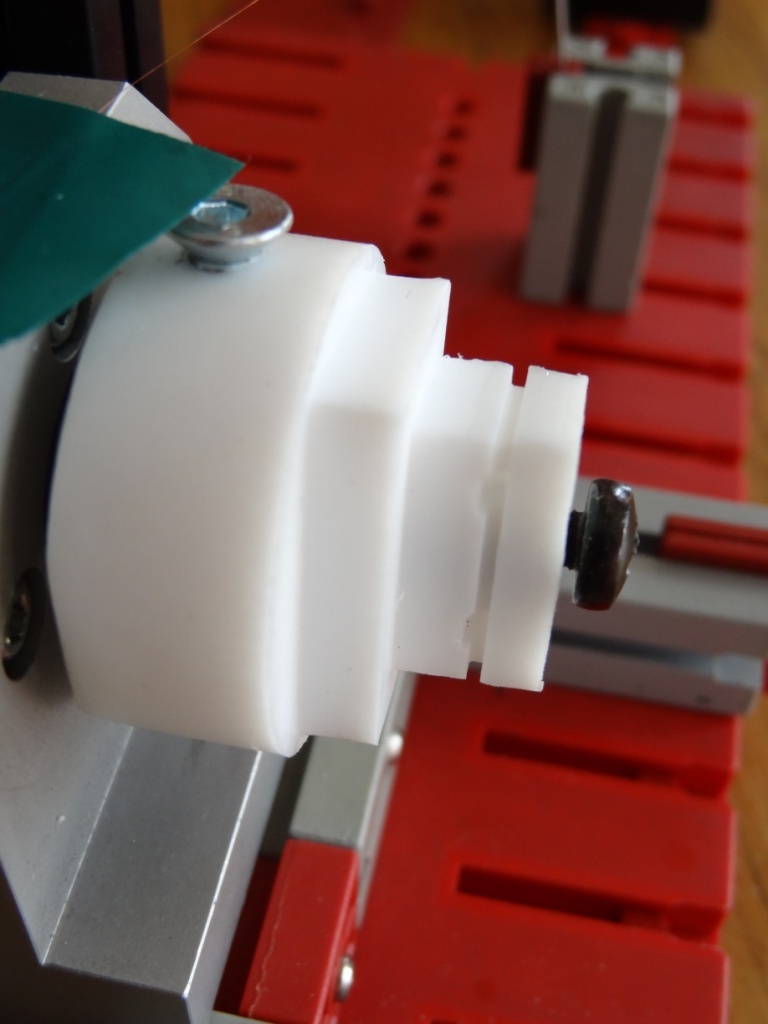
Der kleine Hebelarm stellt sicher, dass beim Wickeln immer eine gewisse Vorspannung auf dem Draht ist. Der Motor selbst ist nicht von Fischertechnik; das ist ein programmierbarer Servomotor, den man über den PC mit Abläufen füttern kann. In dem Fall dreht er beim Drücken eines Tasters langsam los, macht 200 Umdrehungen und stoppt dann wieder (So spart man sich die Fummelei mit Windungszählern). Das Herstellen des Spulenhalters aus Teflon war auch eine ziemliche Fummelei, der Wickelspalt ist nur 0,7x0,7mm groß (Die krummen Kanten kommen übrigens vom nachträglichen Entgraten mit dem Skalpell).
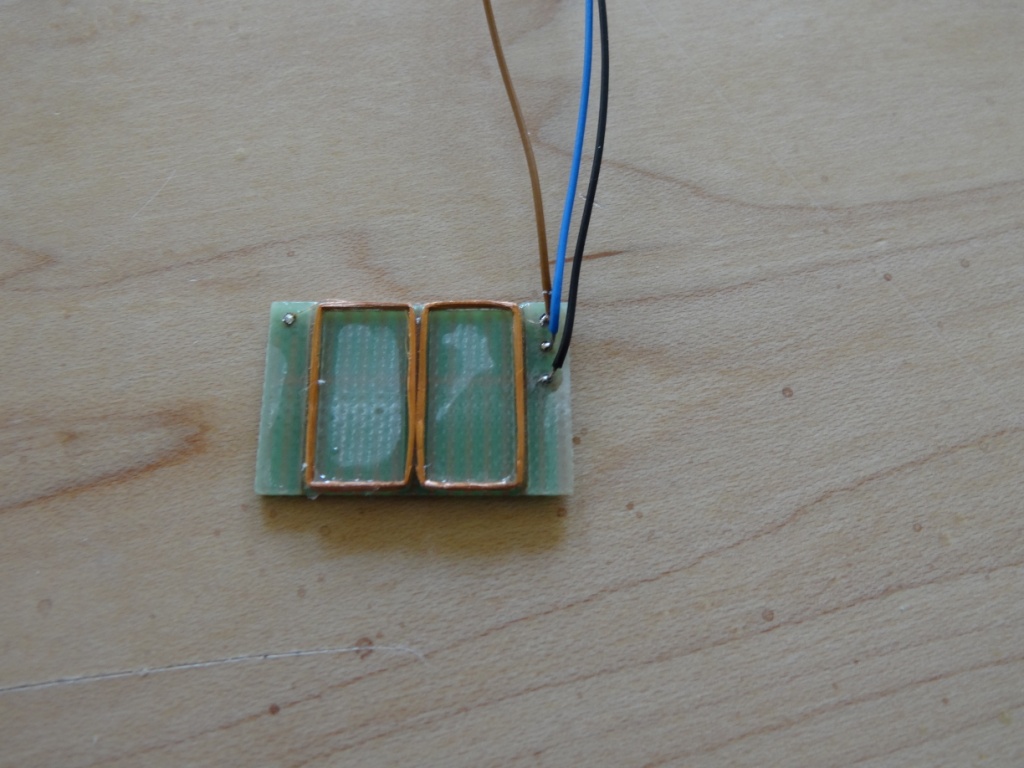
Um Gewicht zu sparen, sollte auch die Sensorplatine möglichst leicht sein. Es gibt dafür auch Platinen mit einer Stärke von 0,5mm, allerdings kosten diese ein Vielfaches einer Standardplatine. Letztendlich habe ich die Standardplatine mit der Fräsmaschine auf 0,5mm abgefräst und zusätzlich eine Aussparung für die Spulen auf 0,3mm gemacht. Somit komme ich auf eine Gesamtstärke mit Spule von etwa 1mm, wodurch der Magnetspalt auch entsprechend schmal ausfallen kann.
Über das Magnetsystem machte ich mir auch viele Gedanken, wie man ein möglichst homogenes Feld aufbaut, ohne dass es vom Antriebssystem beeinflusst wird, bzw. dieses selbst beeinflusst. Und vor allem braucht man eine Lösung, wie man die Magnete in einem definierten Abstand in den Lautsprecher bekommt, ohne dass diese zusammen klatschen (die Magnete haben zusammen eine Haltekraft von 17kg!). Da ich den Magnetaufbau in dieser Form noch bei keinem anderen Hersteller gesehen habe, werde ich dazu vorerst keine Bilder veröffentlichen, bleibt also Betriebsgeheimnis.

Fortsetzung folgt ...
Schöne Grüße
Daniel